





|
|
|
|
Heads of action: |
Roland CHAPUIS Laurent SABOURIN |
This email address is being protected from spambots. You need JavaScript enabled to view it. This email address is being protected from spambots. You need JavaScript enabled to view it. |

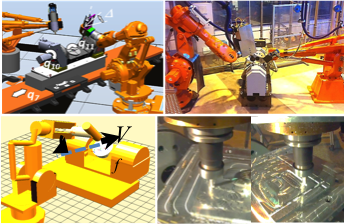
REDUDANCY-BASED OPTIMIZATION APPROACH APPLIED TO ROBOTIC CELL BEHAVIOUR
Robotic architectures offer great capabilities in terms of workspace and kinematics, but suffer from a lack of stiffness when it comes to high loading. Here, we introduce a set of redundancies, together with kinematic, mechanical and stiffness criteria which enable the placement of the task and optimized path planning.
 |
 |
|
| (top left) Schematic of robotic cell. (bottom left) Optimization of paths planning. (right) Validation of strategies. |
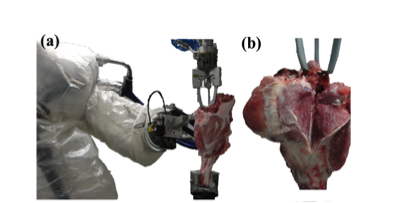
Robotized deboning along 2nd fat vein. |
| Contacts: | Grigore GOGU | This email address is being protected from spambots. You need JavaScript enabled to view it. |
| Youcef MEZOUAR | This email address is being protected from spambots. You need JavaScript enabled to view it. | |
| Laurent SABOURIN | This email address is being protected from spambots. You need JavaScript enabled to view it. |
PhD: R. Cousturier, G. Guire, V. Robin, K. Subrin
Contracts: FUI SRDViand Systèmes Robotisés de Découpe de Viande (2007-2011) / ANR RoboTool/RobProd in EquipEx Robotex (2011-2019) / CPER Project Innov@Pôle (2007-2013) /
UMT 08-02 Mécanisation/Robotisation dans les Filières Viandes et Produits Carnés (2009-2014) / UMT 14.02 Mecarneo (2014-2019) / Transfer action: 2MATech (Contracts : ABB/Renault ACI - SAFE Metal) (2014-2015)
Selected papers:
• Redundancy-based optimization approach to optimize robotic cell behaviour: application to robotic machining, L. Sabourin et al., Industrial Robot: An International Journal 42, 167 (2015).
• Analysis of the human arm gesture for optimizing cutting process in ham deboning with a redundant robotic cell, K. Subrin et al., Industrial Robot: An International Journal 41, 190 (2014).
• Robotic cell for beef carcass primal cutting and pork ham boning in meat industry, G. Guire et al., Industrial Robot: An International Journal 37, 532 (2010) (Outstanding Paper Award 2011, Emerald Literati network).
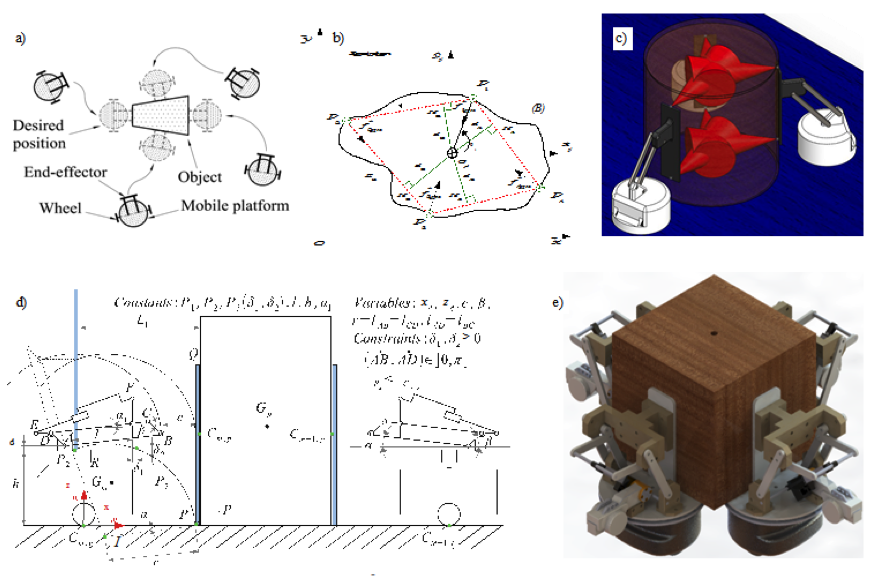
COLLABORATIVE CROSS AND CARRY MOBILE ROBOTS: THE C3BOTS PROJECT
The C3Bots project aims to design Collaborative Cross and Carry mobile roBots to transport payloads of any shape and mass (removal man task). Several mono-robots catch the payload on the ground and use it as a connecting part in the resulting poly-robot. Two architectures are proposed: (i) C3Bots DGP (Dorsal transport of General Payloads), carries the payload on its top platform and achieves optimal positioning maximizing both stability margin and Force Closure Grasping condition. (ii) C3Bots AT/VLP (All-Terrain/Ventral transport of Long Payloads), carries long payloads between its wheels and performs stable obstacle crossing by re-configuring its shape during an 18-step process.
 |
 |
|
|
The mono-robots C3Bots DGP surround the payload (a) to maximize the stability margin (b) and the Force Closure Grasping condition (c). A lifting parallelogram mechanism was designed to bring the payload on the mono-robot top platform (d). CAD view of four mono-robots carrying a box (e). |
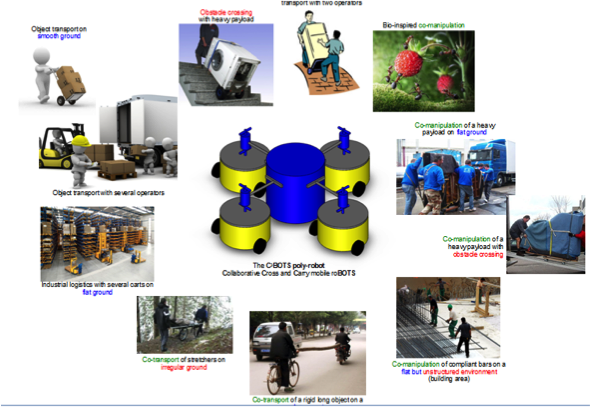
Examples of “removal-man task” solved by one operator or several co-manipulating operators, on smooth grounds/slopes/obstacles, for standard or long payloads |
| Contacts: | Lounis ADOUANE | This email address is being protected from spambots. You need JavaScript enabled to view it. |
| Belhassen-Chedli BOUZGARROU | This email address is being protected from spambots. You need JavaScript enabled to view it. | |
| Jean-Christophe FAUROUX | This email address is being protected from spambots. You need JavaScript enabled to view it. | |
| Youcef MEZOUAR | This email address is being protected from spambots. You need JavaScript enabled to view it. |
PhD/Post doc: B. Hichri/M. Krid
Contracts: ANR LabEx IMobS3 > Défi 1 > RobDyn > C3Bots / ANR RobotEx EQUIPEX
Selected papers:
- Lifting mechanism for payload transport by collaborative mobile robots », in "New Trends in Mechanism and Machine Science , B. Hichri et al., Springer, Mechanisms and Machine Science 34, 157, ISBN 978-3-319-09410-6.
- Cooperative lifting and transport by a group of mobile robots, B. Hichri et al., Int. Symp. on Distributed Autnomous Robotic Systems, DARS 2014, Korea (14 p.).
- Unité robotique de transport de charges longues, J.C. Fauroux et al., PCT Patent, IFMA (2015).