





Nos travaux permettent de concevoir des machines dotées de propriétés avantageuses telles que la redondance structurale et la modularité. On peut ainsi concevoir des robots manipulateurs sériels pouvant reproduire le travail à deux mains (projet ANR ARMS) ou se faufiler avec agilité (thèses ALRIC/MARTIN) ; des manipulateurs parallèles reconfigurables capables d'éviter des singularités (robot 3RPR) ; des robots mobiles redondants et agiles pouvant s'adapter à la charge à transporter ainsi qu'à l'environnement et aux obstacles (projet LabEx C3Bots). Par ailleurs, nous étudions certaines machines aux propriétés originales telles que la kinématotropie (changement de degré de mobilité et/ou connectivité de l’organe terminal au passage de certaines positions singulières), le changement de mode d'assemblage sans passer par des configurations singulières (robot 3CRS, thèse AIMEDEE), l'arc-boutement roulant qui permet la locomotion ascentionnelle sans consommation énergétique à l'arrêt (contrat Thalès et robot Pobot), la recherche d'un actionnement minimal (robot OpenWHEEL i3R) ou enfin l'intégration de matériaux actifs et de pièces flexibles (thèse MEKAOUCHE).


- robot déployable agile pour la neurochirurgie
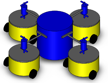
- C3Bots : Robot mobile redondant pour le transport de charges
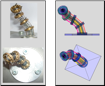
- robot parallèle 3-CRS à structure kinématotropique
- robot grimpeur de poteaux à arc-boutement roulant