





Dans le domaine des machines-outils, des robots d’usinage et de manipulation, le développement de modèles de comportement précis, fiables et robustes suscite une attention croissante des praticiens industriels et des chercheurs.

La modélisation, la commande et l’identification des comportements en service sous sollicitations dynamiques (usinage, parachèvement, découpe, manipulation,…) requiert le développement d'outils numériques et analytiques pour prédire et optimiser les performances et formaliser des règles de conception. Les recherches développées dans cette activité sont génériques et permettent de traiter les différentes architectures cinématiques de machines : sérielles cartésiennes ou anthropomorphes, pleinement parallèles ou hybrides. Les modèles développés sont adaptables aux différents modes d’actionnement et technologies de transmission de puissance : moteurs linéaires, transmission vis-écrou à billes…
La modélisation est indissociable de l’identification dans une approche orientée comportement réel. Il est donc nécessaire de développer des outils d’identification spécifiques aux typologies de modèles proposés afin de les valider ou de les corriger par recalage. L’originalité des travaux de recherche porte sur le développement de modèles globaux de la structure complète en réduisant le paramétrage, via une identification dans les conditions de réalisation de la tâche afin de développer des lois de commande avancées robustes et précises, ainsi seuls les comportements influant la réalisation de la tâche sont pris en compte. L’identification en continu, dans les conditions de service de la machine ou du robot considéré, d’un modèle de comportement adaptatif permet de contrôler les performances du procédé, et représente un enjeu scientifique important. Ces approches sont innovantes au regard des travaux actuels de la communauté scientifique très souvent centrés sur l’élaboration de modèles complexes (type Eléments Finis) intégrant un jeu important de paramètres ou de modèles multi-corps plus simples mais ne considérant que le comportement de certains éléments spécifiques. Des travaux sont également développés sur la modélisation multizone pour le traitement de grandes pièces et sur les robots d’usinage à rigidité réduite.
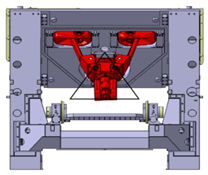
Des applications métier sont traitées, prenant en compte des contraintes spécifiques : développement de machines spéciales pour le bucheronnage mécanisé (projet FUI ECOMEF) ou la découpe de corps mous (projet ANR ARMS). Dans le domaine des véhicules, on s'intéresse à la fois à des phénomènes lents, tels que le braquage différentiel et les phénomènes de glissement local issus de l'interaction roue-sol (travaux sur le véhicule expérimental 6x6 Kokoon) et à des comportements dynamiques rapides, tels que l'étude du franchissement dynamique d'obstacles (projet ANR FAST) ou la stabilisation de drone terrestre rapide en phase balistique (projet Région Auvergne ROBCAT).
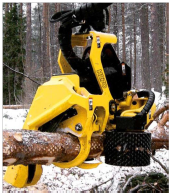
Tête d’abattage et d’ébranchage (projet FUI ECOMEF)
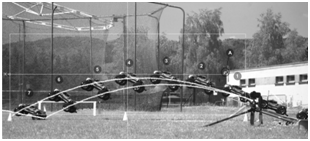
Observation par caméra rapide de la stabilisation
dynamique d'un drone terrestre rapide en phase balistique
(projet Région Auvergne ROBCAT)