





Les enjeux actuels des systèmes mécaniques complexes concernent la réalisation de tâches de plus en plus complexes en environnement de moins en moins structuré dans une société de haute technologie intégrant les aspects sociaux (pénurie de main d’œuvre sur les opérations à forte pénibilité ou dangerosité, aide à la tâche).
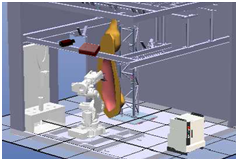
Cellule de découpe et de désossage
Une des voies consiste à rendre le système agile en intégrant des redondances cinématiques ou d’actionnements afin d’en améliorer la dextérité, capacités cinématiques et dynamiques ou la précision. L’originalité de notre approche est de proposer une redondance structurale répartie entre les sous-systèmes de la machine (bras robot porteur pour l’outil et plateaux rotatifs associés à la pièce, cellules multibras) pour la réalisation de tâches complexes. Celle-ci s’accompagne de la définition de critères de gestion de ces redondances liées à la prise en compte des contraintes du procédé (usinage, parachèvement, découpe et manipulation de corps). Ceci permet une optimisation globale du couple Machine/Processus par l’amélioration de la précision et/ou de la dextérité mais également l’intégration de nouveaux modes de commande comme le contrôle en effort. Ceci nécessite une modélisation complète de la structure, la définition d’espaces de capabilité (cinématique, dynamique, de précision) issus de l’étude du comportement réel anisotrope, la définition des contraintes associées à la tâche et la mise en place d’outils de simulation et d’optimisation de la trajectoire ou du placement de celle-ci dans un espace opérationnel adapté. Un certain nombre d’actions concrètes visant l’intégration de cellules robotiques pour des opérations d’usinage et de parachèvement, la découpe/désossage dans la filière viande, ont montré la pertinence des outils développés.
Nos travaux pour les années à venir vont concerner d’une part de nouvelles investigations sur la gestion des redondances avec une commande référencée force ou vision/force pour des opérations de parachèvement ou d’usinage et des opérations plus complexes comme la séparation os/muscle. Les systèmes multi-bras sont l’extension logique des problématiques déjà abordées qui offrent un cadre permettant d'adresser l’interaction avec des objets dans l'environnement de complexité croissante (objets articulés, objets déformables) et l’étude et la maîtrise de la redondance dans la conception afin de répondre aux critères de manipulabilité, commandabilité et d'observabilité. La notion de redondance et de modularité est également introduite dans le domaine de la robotique mobile. Le projet C3Bots (Collaborative Cross and Carry mobile roBOTS) prend place au sein du projet ROBDYN du LABEX IMOBS3, et développe un concept innovant de mono-robots modulaires pouvant s'assembler en un poly-robot complexe aux capacités étendues, pouvant notamment s'adapter à la masse et aux formes de la charge à transporter mais aussi franchir des obstacles en environnements faiblement structurés. Le maintien de la stabilité permanente du poly-robot et de sa charge passe par la compréhension fine des phénomènes de contact roue-sol, robot-robot et robot-charge, ainsi que par la commande de n mono-robots en parallèle. C3Bots permet bénéficier pleinement des avantages de la redondance, tels que stabilité, résistance aux pannes et capacité générique d'adaptation à tout type de charge.
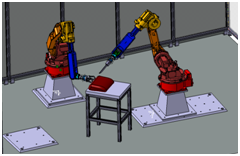
Cellule Multi-bras

Cellule d’usinage et de parachèvement