





Le calcul de trajectoires est une activité de référence du domaine de la CFAO. De nombreuses publications ont porté sur la définition de méthodes de calcul. Les premiers travaux ont résolu les problèmes géométriques inhérents à la modélisation géométriques des pièces et des trajets. Durant la période 2006-2010, nos travaux se sont focalisés sur la formalisation du problème de l’optimisation, essentiellement cinématique, des trajectoires sous contrainte de respect d’exigences géométriques. La modélisation du problème et la résolution algorithmique ont été abordées. Nos travaux s’orientent maintenant dans deux directions.
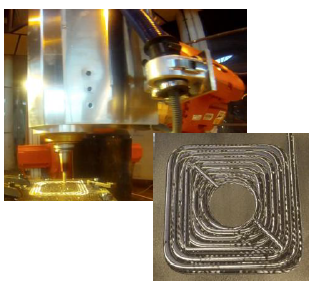
La première concerne la déformation et l’adaptation des trajectoires à la tâche, pour tenir compte de la déformation des pièces et prendre en compte les corrections identifiées par des mesures extéroceptives (optiques ou efforts). Des modèles géométriques et mécaniques doivent être proposés pour tenir compte des informations captées. L’agilité se situe alors au niveau de l’adaptation de trajectoires à la pièce, pièce par pièce. Une autre voie de recherche concerne l’introduction de l’agilité dans les gammes de fabrication. Les évolutions technologiques rapides et les exigences de performance actuelles imposent de remettre en cause régulièrement les gammes de fabrication pour envisager de nouveaux gains. Mais ces évaluations doivent être réalisées à coût nul. Il est donc nécessaire d’envisager un nouveau formalisme de description des gammes de fabrication connecté aux environnements de CFAO, qui puissent évaluer les gains de performance (coût et temps d’usinage) rapidement. Les méthodes actuelles basées sur une description complète et lourde des processus et des opérations d’usinage n’apportent ni la précision ni la réactivité demandées. Le problème nécessite alors une reformulation complète.
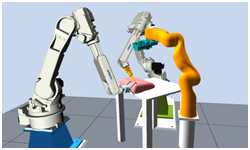
L’évolution des machines avec l’intégration d’architecture parallèle a été un révélateur du potentiel des robots sériels et hybrides pour la réalisation d’opération à fortes sollicitations comme l’usinage.
L’offre des robots dans le secteur se développe mais la précision et le comportement cinématiques et dynamique restent à améliorer pour répondre aux attentes industrielles. La voie dans laquelle se positionnent nos travaux consiste à ajouter des redondances structurales pour améliorer le comportement des cellules et étendre l’espace de travail.
Ils concernent la planification optimisée des trajectoires de cellule multi-redondantes par le développement d’outil de programmation et de simulation pour la réalisation de tâches fortement sollicitantes et complexes comme l’usinage, la découpe et la manipulation de corps mous nécessitant également l’utilisation de commande référencée vision, force ou vision/force. L’optimisation est basée sur la définition d’une fonction objectif multi-critères (cinématique, mécanique, rigidité, précision) et la prise en compte des contraintes du procédé.