





Des formules de calcul de la mobilité, connectivité et hyperstatisme, dépassant les limitations des formules classiques de Tchebychev-Grübler-Kutzbach, ont été proposées. Elles permettent des calculs exacts sur les mécanismes à structure parallèle, qui sont appréciés pour leur rapport rigidité/masse élevé et très utilisés en robotique industrielle (projets EU DEXDEB, robots Isoglide, 3CRS...) et dans le domaine des suspensions de véhicules (projets ANR FAST, projet OpenWHEEL). Ces formules sont indispensables pour le developpement de nouvelles méthodes de synthèse à base de graphes (Activité 3). Par ailleurs, des méthodes originales d’analyse géométrique et cinématique des mécanismes parallèles par outils CAO ont été proposées pour caractériser leur espaces de travail, singularités et modes d'assemblage (thèse ARROUK).
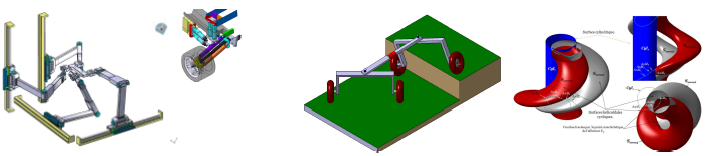
- robot manipulateur Isoglide 4 T3R1 découplé en translation dans son espace de travail
- suspension innovante à 4 mobilité par roues (projet ANR FAST)
- robot agile à roues OpenWHEEL à mobilités variables selon les contacts au sol
- méthode graphique basée CAO pour la détermination des modes d’assemblage d’un robot parallèle plan.