

UMR 6602 - UCA/CNRS
Tutelle secondaire CHU Clermont-Ferrand
Membre de Clermont Auvergne INP




Prix Jeunes Chercheurs
3 prix gagnés par nos docteurs à la 27e édition des Prix Jeunes Chercheurs de Clermont-Ferrand :
Prix Clermont Auvergne Innovation pour Guillaume Mougeot, Docteur en Image, système de perception, robotique (ED SPI) pour sa thèse en collaboration avec l'IGReD et Oxford (Nuclear Plant Envelope).
Prix INP Polytech pour Guy Vano Tsamo Tagouche, Docteur en Ingénierie des Matériaux (ED SPI) pour sa thèse.
Prix de la Fondation UCA pour Ismaël Septembre, Docteur en Physique - Milieux denses et matériaux (ED SF) pour sa thèse.
Nous félicitons Sayed Mohammadreza Shetab Bushehri, Docteur en Génie Electrique, Electronique et Systèmes (ED SPI) qui a brillamment défendu la robotique de manipulation des objets déformables.
Plateforme multi-techniques d’élaboration et de caractérisation
L'Institut Pascal, vient de se doter d'un nouveau Système d'Analyse et de Structuration des Surfaces (SASS) grâce aux financements de l'Union Européenne dans le cadre du FEDER, de la Région AURA et avec le soutien de l'UCA.Cette plateforme est dédiée à l’analyse de matériaux organiques et inorganiques avec un volume qui s'étend de la surface à une profondeur d'environ 50-100 Å. Les techniques de caractérisation disponibles sont multiples : AR-XPS, UPS, ARPES, REELS apportant des informations différentes liées à la profondeur d’analyse et à l’interaction du rayonnement électromagnétique avec la matière.
Séminaire axe ISPR
Collaboration Michelin - IP
Dans le cadre d'une collaboration entre l'Institut Pascal et la manufacture Michelin, une démonstration réelle s'est déroulée le jeudi 10 novembre 2022 afin de montrer les capacités d'un véhicule autonome à évoluer à 40 km/h sur une piste particulièrement éprouvante pour les pneumatiques. Cette première démonstration rentre dans un projet plus global qui doit permettre aux deux partenaires de montrer les capacités de ce type de véhicule à réaliser en autonomie certains tests de pneumatiques mais également de travailler sur le développement de nouveaux tests dont certains plus spécifiques pour ces véhicules de demain.
La fête de la science 2022
Pour l'édition 2022 de la Fête de la Science, l'Institut Pascal était présent sur tous ses thèmes de recherche sur des sites différents du campus des Cézeaux. Les démonstrations aux chercheurs en herbe allaient de la plateforme Pavin Solaire, en passant par les véhicules autonomes, les robots et la 3D, les pouvoirs magiques de la lumière noire et sous forme d'un escape game pour les mystères des capteurs de gaz.
Journées robotiques agricoles
Les deux journées techniques du réseau R2M et du projet AgROBOFood co organisées par INRAE, CEA et Institut Pascal ont lieu ces 12 & 13 octobre sur le site de Montoldre autour des thèmes de la navigation, la sécurité et l’intelligence artificielle pour le développement de robots mobiles en agriculture et en environnement ouvert.
Nous travaillons à l'enrichissement des méthodes existantes de conception créative préliminaire (par exemple Triz), en développant de nouvelles approches telles la morphologie évolutionniste. En amont de la CAO, des travaux actuels (projet FUI ECOMEF) ont permis de proposer de nouveaux outils de bases de connaissances permettant de capitaliser, structurer, encourager et garder trace de la démarche créative au sein d'un projet industriel (thèse GOUBET). Nous souhaitons également proposer des méthodes de conception s'appuyant sur les bases de données de mécanismes.
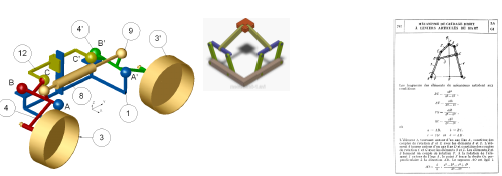
- synthèse structurale de mécanisme de préhension pour tête d'abattage
- synthese structurale et dimensionnelle de robot parallèle
- descriptif de mécanisme selon Artobolevski, à utiliser dans de futures méthodes de synthèse
Des formules de calcul de la mobilité, connectivité et hyperstatisme, dépassant les limitations des formules classiques de Tchebychev-Grübler-Kutzbach, ont été proposées. Elles permettent des calculs exacts sur les mécanismes à structure parallèle, qui sont appréciés pour leur rapport rigidité/masse élevé et très utilisés en robotique industrielle (projets EU DEXDEB, robots Isoglide, 3CRS...) et dans le domaine des suspensions de véhicules (projets ANR FAST, projet OpenWHEEL). Ces formules sont indispensables pour le developpement de nouvelles méthodes de synthèse à base de graphes (Activité 3). Par ailleurs, des méthodes originales d’analyse géométrique et cinématique des mécanismes parallèles par outils CAO ont été proposées pour caractériser leur espaces de travail, singularités et modes d'assemblage (thèse ARROUK).
- robot manipulateur Isoglide 4 T3R1 découplé en translation dans son espace de travail
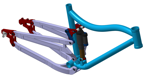
- suspension innovante à 4 mobilité par roues (projet ANR FAST)
- robot agile à roues OpenWHEEL à mobilités variables selon les contacts au sol
- méthode graphique basée CAO pour la détermination des modes d’assemblage d’un robot parallèle plan.
L'équipe développe des bases de données contenant des descriptions précises d'un grand nombre de machines (livres, brevets, schémas, modèles 2D, modèles CAO 3D...), à la fois pour préserver la connaissance (projet EU thinkMOTION), favoriser leur enseignement (projet EU CLEM) et cartographier l'existant dans le domaine des machines, ce qui passe par une classification précise, analogue à la classification générale du vivant et encourage à la réutilisation des solutions performantes pour les tâches de conception routinière.
Projet européen thinkMOTION : une bibliothèque libre et en ligne sur les machines et mécanismes, comportant :
des modèles CAO fixes et animés

des photos et vidéos de machines réelles

des photos et vidéos de machines réelles

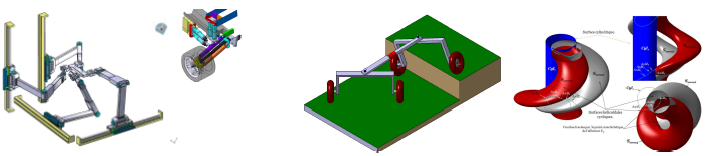
- Robot manipulateurs parallèle Isoglide 4 T3R1
- Démonstrateur pour déploiement agile le long de trajectoires coudées en neurochirurgie
- Suspension innovante pour drone terrestre rapide MiniFAST
- Robot mobile agile OpenWHEEL i3R
Dans le processus de conception d'une machine, d'un mécanisme ou d'un robot, la synthèse structurale est l'opération permettant de passer d'une expression fonctionnelle des capacités souhaitées pour la machine à la description d'une ou plusieurs solutions possible, à minima par un modèle cinématique qualitatif (nature et ordre des liaisons, angles relatifs...) compatible avec ces fonctions.
Après l'étape de synthèse structurale, la synthèse dimensionnelle permet d'enrichir un modèle cinématique par des informations supplémentaires (longueurs, matériaux...) pouvant affecter des propriétés cinématiques (trajectoires, orientations, espace de travail...) ou structurales (résistance, rigidité...). Pour pouvoir obtenir les informations manquante, on fait généralement appel à une démarche d'optimisation permettant de maximiser un critère (rigidité, fréquence propre, stabilité...) en faisant varier des variables structurales de conception dans un domaine de conception délimité par des contraintes de conception.
Au sein de notre équipe, les applications de ces deux activités de synthèse structurale et dimensionnelle visent notamment les robots manipulateurs, les machines d’usinage, les mécanismes de suspension, les véhicules robotisés et les robots déployables pour les interventions neurochirurgicales, les robots pour la découpe/désossage et séparation des muscles dans l’industrie de la viande.
Activité scientifique
Nos travaux de recherche en synthèse de mécanismes et de robots sont organisés selon les quatre activités scientifiques suivantes
- Capitalisation du savoir sur la structure des machines
- Nouveaux outils d'analyse pour la synthèse
- Méthodologies de synthèse de mécanismes
- Machines à propriétés structurales spécifiques (redondance, modularité, kinématotropie, ...)
Plaquette de présentation
Le thème scientifique est constitué de 10 permanents, 2 post-doctorants et 5 doctorants :
Permanents
- Jean-Christophe Fauroux (MCF HDR, référent scientifique)
- Nicolas Bouton (MCF)
- Belhassen Chedli Bouzgarrou (MCF)
- Fréderic Chapelle (MCF)
- Grigore Gogu (Pr)
Post-doctorants
- ARROUK Khaled
- KRID Mohamed (Co-encadrants : Bouzgarrou / Fauroux)
Doctorants
- AIMEDEE Marie Fiedele (Encadrant : G. Gogu, Co-encadrants : C.B. Bouzgarrou, N. Bouton) ; Synthèse et commande des mécanismes reconfigurables.
- GOUBET David (Encadrant : Gogu, Co-encadrant : Fauroux) ; Eco-concevoir un outil de mécanisation pour le bûcheronnage dans les peuplements feuillus: méthodologie de conception innovante
- HICHRI Bassem (Encadrant : Mézouar, Co-encadrants : Adouane, Doroftei, Fauroux), Design of Collaborative Cross and Carry mobile roBots(C3Bots)
- MEKAOUCHE Adel (Encadrant : X. Balandraud, Co-encadrant : F. Chapelle) ; Conception de robots avec segments à rigidité commandable
- PAGIS Georges (Directeur de thèse : P. Martinet (IRCCYN), Co-encadrants : S. Briot (IRRCYN), N. Bouton (IP))
Thèses soutenues
- ALRIC Matthieu, Conception et modélisation modulaire d'un robot bio-inspiré extensible pour l'accès aux tumeurs dans le cerveau, thèse soutenue le 4 décembre 2009, .
- ARROUK ASSAD Khaled. Techniques de conception assistée par ordinateur (CAO) pour la caractérisation de l’espace de travail de robots manipulateurs parallèles. Thèse de doctorat, Université Blaise Pascal, Clermont-Ferrand, 12 juillet 2012.
- MARTIN Carole. Conception, modélisation et planification de mouvement d’un robot de résection pour la neurochirurgie. Thèse de doctorat, Université Blaise Pascal, Clermont-Ferrand, 3 novembre 201
Collaborations sur les 5 dernières années
Nationales
- Laboratoire LIRMM (Montpellier)
- Laboratoire IRCCYN (Nantes)
- Laboratoire ISIR (Paris)
- Laboratoire IGCNC (Clermont-Ferrand)
- Laboratoire CICE (Centre International de Chirurgie Endoscopique) (Clermont-Ferrand)
- Bureau d'études ISI (Cournon d'Auvergne)
- Bureau d'études M-Tecks EAC (Brive)
- Entreprise Michelin (Clermont-Ferrand)
- Entreprise Thales Optronique (Paris)
Internationales
- Université de Aachen RWTH (Rheinisch-Westfälische Technische Hochschule), Institut für Getriebetechnik und Maschinendynamik (Germany)
- Ilmenau University of Technology (Germany)
- Universidad del País Vasco/ Euskal Herriko Unibertsitatea, Department of Mechanical Engineering – Faculty of Engineering in Bilbao (Spain)
- Universitatea Politehnica din Timisoara, Facultatea de Mecanica (Romania)
- Università degli studi di Cassino, Laboratorio di Robotica e Meccatronica (Italy)
- King's College of University of London (Great Britain)
- “Gh. Asachi” Technical University of Iasi, Romania, Mechanical Engineering Faculty, Mechanical Engineering, Mechatronics and Robotics Department. (Romania)
- Coventry University (Great Britain)
- Technical University of Cluj-Napoca (Romania)
- University of Rousse "Angel kanchev" (Bulgaria)
- Company ESTA-Bildungswerk gGmbH (Germany)
- Company Hildebrand Technology Limited (Great Britain)
Contrats sur les 5 dernières années
Projets FUI ou pré-compétitifs
- Projet FUI ECOMEF (2011-2014) « Eco-concevoir un outil de mécanisation pour le bûcheronnage dans les peuplements feuillus »
- Projet DGA RAPID ARTHRON (2010-2012) « Arthron P, plate-forme robotique ascentionnelle à pattes »
Projets ANR
- Projet ANR FAST (2007-2010) « Fast Autonomous rover SysTem »
- Projet ANR ARMS (2010-2014) « Acronyme »
Projets européens
- Projet européen Echord DEXDEB « Application of DEXterous hands for DEBoning operation » (2011-2013)
- Projet européen thinkMOTION « DMG-Lib goes Europeana: an open digital library of machines and mechanisms » (2010-2013). http://www.thinkmotion.eu
- Projet européen CLEM (2012-2013) « CLoud services for E-learning in Mechatronics technology ». http://www.clem-project.eu
Projets nationaux et internationaux
- Action LabEx ImobS3, action SynCom (SYnthèse et COMmande de Mécanismes Reconfigurables). Collaboration avec le Professeur Jian DAI, KING’s College of London, Royaume Uni.
- Action LabEx ImobS3, projet C3Bots (Collaborative Cross and Carry mobile roBots), action RobDyn (Vers la maitrise du comportement des systèmes ROBotiques sous fortes sollicitations DYNamiques). Collaboration avec le Professeur Ioan DOROFTEI, “Gh. Asachi” Technical University of Iasi, Roumanie.
- Contrat de recherche Thales Optronique SA, robot grimpeur de poteaux PoBot (2006-2007).
- Projet ROBEA MAX « Machines à architecture compleXe »
Moyens expérimentaux et/ou de calcul
- Kits mécatroniques modulaires à différentes échelles
- Kits robustes (profilés aluminium Norcan, moteurs brushless PARVEX, architecture de commande ADEPT)
- Kits miniatures (type Mindstorms NXT, EV3...)
- Architecture de commande 6 axes ADEPT
- Démonstrateurs de robots parallèles :
- Robot Isoglide 4 T3R1
- Robot 3CRS
- Robot 3RRR
- Robot parallèle plan de type 5 barres
- Robot 8 barres (en construction)
- Démonstrateur de suspension innovante OCP (Optimized Contact Patch) (brevet Institut Pascal / Michelin)
- Démonstrateurs mono-fonctionnels de mécanismes pour tête de bûcheronnage forestier
- Démonstrateur PoBot de robot grimpeur de poteaux coniques (brevet Institut Pascal /Thales)
- Démonstrateur MiniFAST de drone terrestre rapide doté de quatre suspensions innovantes permettant l'amortissement des chocs horizontaux (brevet Institut Pascal /IFMA)
- Trois démonstrateur à différentes échelles du robot agile OpenWHEEL i3R
- Deux démonstrateurs C3Bots de robots mobiles agiles collaboratifs pour le transport de charge et le franchissement d'obstacles
- Base de données de machines et mécanismes (http://www.dmg-lib.org) comportant 34055 items créés par l'équipe française lors du projet européen thinkMOTION
- 362 livres, pour un total de 52425 pages scannées et 1748 planches graphiques. L'édition française de l'ouvrage d'Artobolevski est désormais librement accessible en ligne (7 tomes, 4746 descriptifs de mécanismes) ;
- 16452 items issus de re-modélisation en CAO de machines tirées de brevets et de l'encyclopédie d'Artobolevski
- 12229 images
- 1699 vidéos
- 554 modèles CAO, déclinés également en modèles VRML et 3DXML et 43 modèles PDF 3D.
- 42 modèles Geogebra
- 169 brevets
- images et dont 554 modèles CAO,
- 18195 items issus de machines réelles du projet PATSTEC, des musées Crozatier, Lecoq et Michelin, dont notamment :
- 8611 photos en monovision
- 6496 photos en stéréovision
- 813 vidéos en monovision
- 337 vidéos en stéréovision