

UMR 6602 - UCA/CNRS
Tutelle secondaire CHU Clermont-Ferrand
Membre de Clermont Auvergne INP




Prix Jeunes Chercheurs
3 prix gagnés par nos docteurs à la 27e édition des Prix Jeunes Chercheurs de Clermont-Ferrand :
Prix Clermont Auvergne Innovation pour Guillaume Mougeot, Docteur en Image, système de perception, robotique (ED SPI) pour sa thèse en collaboration avec l'IGReD et Oxford (Nuclear Plant Envelope).
Prix INP Polytech pour Guy Vano Tsamo Tagouche, Docteur en Ingénierie des Matériaux (ED SPI) pour sa thèse.
Prix de la Fondation UCA pour Ismaël Septembre, Docteur en Physique - Milieux denses et matériaux (ED SF) pour sa thèse.
Nous félicitons Sayed Mohammadreza Shetab Bushehri, Docteur en Génie Electrique, Electronique et Systèmes (ED SPI) qui a brillamment défendu la robotique de manipulation des objets déformables.
Plateforme multi-techniques d’élaboration et de caractérisation
L'Institut Pascal, vient de se doter d'un nouveau Système d'Analyse et de Structuration des Surfaces (SASS) grâce aux financements de l'Union Européenne dans le cadre du FEDER, de la Région AURA et avec le soutien de l'UCA.Cette plateforme est dédiée à l’analyse de matériaux organiques et inorganiques avec un volume qui s'étend de la surface à une profondeur d'environ 50-100 Å. Les techniques de caractérisation disponibles sont multiples : AR-XPS, UPS, ARPES, REELS apportant des informations différentes liées à la profondeur d’analyse et à l’interaction du rayonnement électromagnétique avec la matière.
Séminaire axe ISPR
Collaboration Michelin - IP
Dans le cadre d'une collaboration entre l'Institut Pascal et la manufacture Michelin, une démonstration réelle s'est déroulée le jeudi 10 novembre 2022 afin de montrer les capacités d'un véhicule autonome à évoluer à 40 km/h sur une piste particulièrement éprouvante pour les pneumatiques. Cette première démonstration rentre dans un projet plus global qui doit permettre aux deux partenaires de montrer les capacités de ce type de véhicule à réaliser en autonomie certains tests de pneumatiques mais également de travailler sur le développement de nouveaux tests dont certains plus spécifiques pour ces véhicules de demain.
La fête de la science 2022
Pour l'édition 2022 de la Fête de la Science, l'Institut Pascal était présent sur tous ses thèmes de recherche sur des sites différents du campus des Cézeaux. Les démonstrations aux chercheurs en herbe allaient de la plateforme Pavin Solaire, en passant par les véhicules autonomes, les robots et la 3D, les pouvoirs magiques de la lumière noire et sous forme d'un escape game pour les mystères des capteurs de gaz.
Journées robotiques agricoles
Les deux journées techniques du réseau R2M et du projet AgROBOFood co organisées par INRAE, CEA et Institut Pascal ont lieu ces 12 & 13 octobre sur le site de Montoldre autour des thèmes de la navigation, la sécurité et l’intelligence artificielle pour le développement de robots mobiles en agriculture et en environnement ouvert.
Les enjeux actuels des systèmes mécaniques complexes concernent la réalisation de tâches de plus en plus complexes en environnement de moins en moins structuré dans une société de haute technologie intégrant les aspects sociaux (pénurie de main d’œuvre sur les opérations à forte pénibilité ou dangerosité, aide à la tâche).
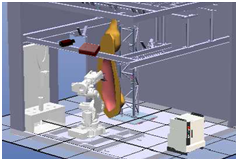
Cellule de découpe et de désossage
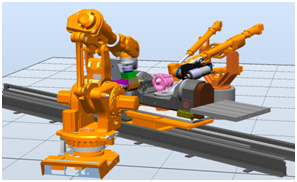
Une des voies consiste à rendre le système agile en intégrant des redondances cinématiques ou d’actionnements afin d’en améliorer la dextérité, capacités cinématiques et dynamiques ou la précision. L’originalité de notre approche est de proposer une redondance structurale répartie entre les sous-systèmes de la machine (bras robot porteur pour l’outil et plateaux rotatifs associés à la pièce, cellules multibras) pour la réalisation de tâches complexes. Celle-ci s’accompagne de la définition de critères de gestion de ces redondances liées à la prise en compte des contraintes du procédé (usinage, parachèvement, découpe et manipulation de corps). Ceci permet une optimisation globale du couple Machine/Processus par l’amélioration de la précision et/ou de la dextérité mais également l’intégration de nouveaux modes de commande comme le contrôle en effort. Ceci nécessite une modélisation complète de la structure, la définition d’espaces de capabilité (cinématique, dynamique, de précision) issus de l’étude du comportement réel anisotrope, la définition des contraintes associées à la tâche et la mise en place d’outils de simulation et d’optimisation de la trajectoire ou du placement de celle-ci dans un espace opérationnel adapté. Un certain nombre d’actions concrètes visant l’intégration de cellules robotiques pour des opérations d’usinage et de parachèvement, la découpe/désossage dans la filière viande, ont montré la pertinence des outils développés.
Nos travaux pour les années à venir vont concerner d’une part de nouvelles investigations sur la gestion des redondances avec une commande référencée force ou vision/force pour des opérations de parachèvement ou d’usinage et des opérations plus complexes comme la séparation os/muscle. Les systèmes multi-bras sont l’extension logique des problématiques déjà abordées qui offrent un cadre permettant d'adresser l’interaction avec des objets dans l'environnement de complexité croissante (objets articulés, objets déformables) et l’étude et la maîtrise de la redondance dans la conception afin de répondre aux critères de manipulabilité, commandabilité et d'observabilité. La notion de redondance et de modularité est également introduite dans le domaine de la robotique mobile. Le projet C3Bots (Collaborative Cross and Carry mobile roBOTS) prend place au sein du projet ROBDYN du LABEX IMOBS3, et développe un concept innovant de mono-robots modulaires pouvant s'assembler en un poly-robot complexe aux capacités étendues, pouvant notamment s'adapter à la masse et aux formes de la charge à transporter mais aussi franchir des obstacles en environnements faiblement structurés. Le maintien de la stabilité permanente du poly-robot et de sa charge passe par la compréhension fine des phénomènes de contact roue-sol, robot-robot et robot-charge, ainsi que par la commande de n mono-robots en parallèle. C3Bots permet bénéficier pleinement des avantages de la redondance, tels que stabilité, résistance aux pannes et capacité générique d'adaptation à tout type de charge.
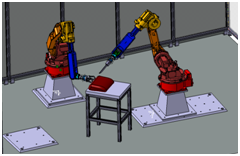
Cellule Multi-bras

Cellule d’usinage et de parachèvement
Dans le domaine des machines-outils, des robots d’usinage et de manipulation, le développement de modèles de comportement précis, fiables et robustes suscite une attention croissante des praticiens industriels et des chercheurs.
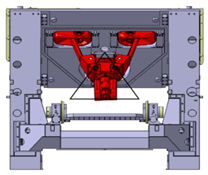

La modélisation, la commande et l’identification des comportements en service sous sollicitations dynamiques (usinage, parachèvement, découpe, manipulation,…) requiert le développement d'outils numériques et analytiques pour prédire et optimiser les performances et formaliser des règles de conception. Les recherches développées dans cette activité sont génériques et permettent de traiter les différentes architectures cinématiques de machines : sérielles cartésiennes ou anthropomorphes, pleinement parallèles ou hybrides. Les modèles développés sont adaptables aux différents modes d’actionnement et technologies de transmission de puissance : moteurs linéaires, transmission vis-écrou à billes…
La modélisation est indissociable de l’identification dans une approche orientée comportement réel. Il est donc nécessaire de développer des outils d’identification spécifiques aux typologies de modèles proposés afin de les valider ou de les corriger par recalage. L’originalité des travaux de recherche porte sur le développement de modèles globaux de la structure complète en réduisant le paramétrage, via une identification dans les conditions de réalisation de la tâche afin de développer des lois de commande avancées robustes et précises, ainsi seuls les comportements influant la réalisation de la tâche sont pris en compte. L’identification en continu, dans les conditions de service de la machine ou du robot considéré, d’un modèle de comportement adaptatif permet de contrôler les performances du procédé, et représente un enjeu scientifique important. Ces approches sont innovantes au regard des travaux actuels de la communauté scientifique très souvent centrés sur l’élaboration de modèles complexes (type Eléments Finis) intégrant un jeu important de paramètres ou de modèles multi-corps plus simples mais ne considérant que le comportement de certains éléments spécifiques. Des travaux sont également développés sur la modélisation multizone pour le traitement de grandes pièces et sur les robots d’usinage à rigidité réduite.
Des applications métier sont traitées, prenant en compte des contraintes spécifiques : développement de machines spéciales pour le bucheronnage mécanisé (projet FUI ECOMEF) ou la découpe de corps mous (projet ANR ARMS). Dans le domaine des véhicules, on s'intéresse à la fois à des phénomènes lents, tels que le braquage différentiel et les phénomènes de glissement local issus de l'interaction roue-sol (travaux sur le véhicule expérimental 6x6 Kokoon) et à des comportements dynamiques rapides, tels que l'étude du franchissement dynamique d'obstacles (projet ANR FAST) ou la stabilisation de drone terrestre rapide en phase balistique (projet Région Auvergne ROBCAT).
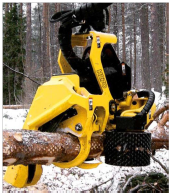
Tête d’abattage et d’ébranchage (projet FUI ECOMEF)
Observation par caméra rapide de la stabilisation
dynamique d'un drone terrestre rapide en phase balistique
(projet Région Auvergne ROBCAT)
L’optimisation des performances pour la réalisation de tâches complexes des machines d’usinage, des robots manipulateurs, des véhicules robotisés et des mécanismes de locomotion impose une connaissance très précise du comportement mécanique. L’activité scientifique du thème porte sur le développement de modèles de comportement robustes et fiables, couplés à des lois de commande avancées et à l’identification géométrique, statique, cinématique et dynamique des machines et des mécanismes
Activité scientifique
Ce thème se décline en trois activités scientifiques :
- Modélisation, commandes et identification du comportement des machines
- Intégration des machines à architectures complexes et redondantes
- Surveillance et maintenance adaptative
Plaquette de présentation

Le thème scientifique est constitué de 10 permanents, 2 post-doctorants et 19 doctorants :
Permanents
- Nicolas Bouton (MCF, Référent scientifique)
- Belhassen Chedli Bouzgarrou (MCF)
- Hélène Chanal (MCF-HDR)
- Frederic Chapelle (MCF)
- Jean-Christophe Fauroux (MCF HDR)
- Vincent Gagnol (MCF)
- Grigore Gogu (Pr)
- Khalid Kouiss (MCF)
- Thien-Phu Le (MCF)
- Laurent Sabourin (MCF-HDR)
Post-doctorants
- Jamil DAKHLALLAH
- Liang JU
Doctorants
- AIMEDEE Marie Fiedele
- BENTI Aurélie
- COUSTURIER Richard
- DAVIS Marc
- ESSAHBI Nabil
- GELY Benoit
- GOUBET David
- GUICHARD Bastien
- GUTIERREZ José
- HASSINI Sami
- HATTON Benjamin
- HENDRIKO Hendriko
- HICHRI Bassem
- LE FLOHIC Julien
- MEJRI Seifeddine
- MOUSAVI Saïd
- PAGIS Georges
- TROUVAIN Guillaume
- ZAÏDI Lazher
Thèses soutenues
- ARROUK ASSAD Khaled. Techniques de conception assistée par ordinateur (CAO) pour la caractérisation de l’espace de travail de robots manipulateurs parallèles. Thèse de doctorat, Université Blaise Pascal, Clermont-Ferrand, 12 juillet 2012.
- BONNEMAINS Thomas, « Etude du comportement mécanique des machines outils à structure parallèle en Usinage Grande Vitesse », directeur : P. Ray, co-encadrants : Chedli Bouzgarrou et Hélène Chanal
- CANO Tony, Métrologie et Méthode d’identification, pour la prise en compte des déformations élastiques des machines à structure parallèle, 21 décembre 2007, http://tel.archives-ouvertes.fr/docs/00/71/84/39/PDF/2007CLF21816.pdf
- FORESTIER Fabien, Modélisation du comportement dynamique du système : tête de forage vibratoire – électrobroche, IFMA, directeur : P. Ray, co-encadrant : Vincent GAGNOL, 23/11/2010.
- GUIRE Grégory. Contribution à la mise en œuvre d’un processus robotisé pour la découpe primaire de carcasses bovines et de désossage de jambon. Thèse de doctorat, Université Blaise Pascal, Clermont-Ferrand, 8 juin 2011. (Thèse confidentielle).
- MARTIN Carole. Conception, modélisation et planification de mouvement d’un robot de résection pour la neurochirurgie. Thèse de doctorat, Université Blaise Pascal, Clermont-Ferrand, 3 novembre 2010.
- SUBRIN Kévin, Optimisation du comportement de cellules robotiques par gestion des redondances : application à la découpe de viande et à l’Usinage Grande Vitesse, Université Blaise Pascal, 13 Décembre 2013.
- PATELOUP Sylvain - Modélisations et aptitudes à l'emploi des nouvelles architectures de machines outils à structure parallèle : Application à la machine Tripteor-X7 -Thèse de l’Université Blaise Pascal – Directeur E. Duc – coencadrement H. Chanal – 7 juillet 2011
Collaborations sur les 5 dernières années
Nationales
- l’UMT08-2 « Mécanisation-robotisation dans les filières viandes et produits carnés » (2008/13).
- Projet ANR Arpege ARMS « Système multi-bras pour la séparation de muscles » (2010-14)
- Thèse de G. Pagis, directeur de thèse : P. Martinet (IRCCyN), co-encadrants : N. Bouton (IP) et S. Briot (IRCCyN)
- ANR Vopamp 2010-2012
- FUI FGVV
- Projet FUI ECOMEF (2011-2014)
- Laboratoire IRSTEA (Clermont-Ferrand)
- Laboratoire LIMOS (Clermont-Ferrand)
- Laboratoire LIRMM (Montpellier)
- Laboratoire ISIR (Paris)
- Bureau d'études ISI (Cournon d'Auvergne)
- Entreprise VIBRAFLOOR (Givry)
Internationales
- Projet Echord DEXDEB « application of DEXterous hands for DEBoning operation » (2011-2012)
- Projet CLEM: “CLoud services for E-learning in Mechatronics technology”. Grant Agreement No 518656-LLP-1-2011-1-UK-LEONARDO-LMP (2012 – 2013)
Contrats sur les 5 dernières années
- Projet LABEX RECONF : Système de Production Reconfigurable : 2012-2015
- Projet FUI SRDViand : Systèmes Robotisés de Découpe de Viande, N° 062906298 (2007-2011) Normal 0 21 false false false FR X-NONE X-NONE
- Projet FUI FGVV : Forage Grande Vitesse Vibratoire (2007- 2011)
- Projet EQUIPEX RobotEx : Réseau national de plateformes robotiques d’excellence (2012-2022)
- Projet LABEX IMOBS3 : Innovative Mobility : Smart ans Sustainable Solutions (2011-2021)
Moyens expérimentaux et/ou de calcul
- Tripteor X7 Normal 0 21 false false false FR X-NONE X-NONE
- Centres d’usinage à 4 et 5 axes
- Laser tracker Leica
- Cellule robotisée de manipulation dextre équipé d’un Robot ADEPT Viper 1700 (Projet Equipex ROBOTEX)
- Cellule robotisée d’usinage et de parachèvement équipé d’un robot ABB IRB6660, et d’un robot PKM Tricept T606 (Projet Equipex ROBOTEX)
- Boitier d’acquisition multivoies LMS associé au logiciel LMS TestLab
- Robot parallèle modulaires (3RRR, 3CRS, 5 barres plan)
- Architecture de commande 6 axes ADEPT
- Caméra rapide très haute résolution spatio-temporelle (PCO Dimax)
- Double caméra rapide pour stéréovision rapide (AOS S-Motion)
- Capteurs de force 6 composantes pour instrumentation de moyeux de roues (TSR)
- Banc d'essais d'ébranchage avec mesure de la force de coupe du bois
- Véhicule 6x6 expérimental dotés de suspensions reconfigurables, de roues à gonflage adaptatif et mesure de force en roulant (véhicule KOKOON)
- Banc d'essai et véhicule rapide à auto-stabilisation en phase balistique
Nos travaux permettent de concevoir des machines dotées de propriétés avantageuses telles que la redondance structurale et la modularité. On peut ainsi concevoir des robots manipulateurs sériels pouvant reproduire le travail à deux mains (projet ANR ARMS) ou se faufiler avec agilité (thèses ALRIC/MARTIN) ; des manipulateurs parallèles reconfigurables capables d'éviter des singularités (robot 3RPR) ; des robots mobiles redondants et agiles pouvant s'adapter à la charge à transporter ainsi qu'à l'environnement et aux obstacles (projet LabEx C3Bots). Par ailleurs, nous étudions certaines machines aux propriétés originales telles que la kinématotropie (changement de degré de mobilité et/ou connectivité de l’organe terminal au passage de certaines positions singulières), le changement de mode d'assemblage sans passer par des configurations singulières (robot 3CRS, thèse AIMEDEE), l'arc-boutement roulant qui permet la locomotion ascentionnelle sans consommation énergétique à l'arrêt (contrat Thalès et robot Pobot), la recherche d'un actionnement minimal (robot OpenWHEEL i3R) ou enfin l'intégration de matériaux actifs et de pièces flexibles (thèse MEKAOUCHE).


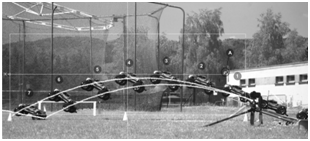
- robot déployable agile pour la neurochirurgie
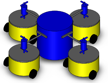
- C3Bots : Robot mobile redondant pour le transport de charges
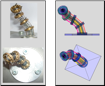
- robot parallèle 3-CRS à structure kinématotropique
- robot grimpeur de poteaux à arc-boutement roulant