

UMR 6602 - UCA/CNRS
Tutelle secondaire CHU Clermont-Ferrand
Membre de Clermont Auvergne INP




Prix Jeunes Chercheurs
3 prix gagnés par nos docteurs à la 27e édition des Prix Jeunes Chercheurs de Clermont-Ferrand :
Prix Clermont Auvergne Innovation pour Guillaume Mougeot, Docteur en Image, système de perception, robotique (ED SPI) pour sa thèse en collaboration avec l'IGReD et Oxford (Nuclear Plant Envelope).
Prix INP Polytech pour Guy Vano Tsamo Tagouche, Docteur en Ingénierie des Matériaux (ED SPI) pour sa thèse.
Prix de la Fondation UCA pour Ismaël Septembre, Docteur en Physique - Milieux denses et matériaux (ED SF) pour sa thèse.
Nous félicitons Sayed Mohammadreza Shetab Bushehri, Docteur en Génie Electrique, Electronique et Systèmes (ED SPI) qui a brillamment défendu la robotique de manipulation des objets déformables.
Plateforme multi-techniques d’élaboration et de caractérisation
L'Institut Pascal, vient de se doter d'un nouveau Système d'Analyse et de Structuration des Surfaces (SASS) grâce aux financements de l'Union Européenne dans le cadre du FEDER, de la Région AURA et avec le soutien de l'UCA.Cette plateforme est dédiée à l’analyse de matériaux organiques et inorganiques avec un volume qui s'étend de la surface à une profondeur d'environ 50-100 Å. Les techniques de caractérisation disponibles sont multiples : AR-XPS, UPS, ARPES, REELS apportant des informations différentes liées à la profondeur d’analyse et à l’interaction du rayonnement électromagnétique avec la matière.
Séminaire axe ISPR
Collaboration Michelin - IP
Dans le cadre d'une collaboration entre l'Institut Pascal et la manufacture Michelin, une démonstration réelle s'est déroulée le jeudi 10 novembre 2022 afin de montrer les capacités d'un véhicule autonome à évoluer à 40 km/h sur une piste particulièrement éprouvante pour les pneumatiques. Cette première démonstration rentre dans un projet plus global qui doit permettre aux deux partenaires de montrer les capacités de ce type de véhicule à réaliser en autonomie certains tests de pneumatiques mais également de travailler sur le développement de nouveaux tests dont certains plus spécifiques pour ces véhicules de demain.
La fête de la science 2022
Pour l'édition 2022 de la Fête de la Science, l'Institut Pascal était présent sur tous ses thèmes de recherche sur des sites différents du campus des Cézeaux. Les démonstrations aux chercheurs en herbe allaient de la plateforme Pavin Solaire, en passant par les véhicules autonomes, les robots et la 3D, les pouvoirs magiques de la lumière noire et sous forme d'un escape game pour les mystères des capteurs de gaz.
Journées robotiques agricoles
Les deux journées techniques du réseau R2M et du projet AgROBOFood co organisées par INRAE, CEA et Institut Pascal ont lieu ces 12 & 13 octobre sur le site de Montoldre autour des thèmes de la navigation, la sécurité et l’intelligence artificielle pour le développement de robots mobiles en agriculture et en environnement ouvert.
Le management industriel et logistique concerne un très vaste ensemble de domaines comprenant notamment la conception des produits et des processus de production, la gestion des flux physiques, la politique d’achat et de sous-traitance (Baglin et al, 2005). La majorité des approches proposées dans la littérature et parfois mises en œuvre industriellement repose sur des modèles contenant des données supposées représenter le futur fonctionnement du système et son futur environnement de travail.
Malheureusement, ces données sont parfois imprécises, souvent incertaines et potentiellement évolutives durant le cycle de vie du système. C’est pourquoi des notions comme la robustesse, l’agilité, la résilience, l’adaptabilité, etc. sont devenues des concepts clés depuis quelques années. Cependant la plupart des travaux existants repose sur une modélisation probabiliste et bayésienne de ces données. Or, il est rarement possible de disposer de lois de probabilité suffisamment fiables.
La théorie de la décision propose un ensemble d’outils mathématiques aidant la prise de décision en milieu aléatoire et risqué et permettant de guider les décideurs dans leur choix. A notre connaissance, seuls les concepts de base et les critères les plus classiques de la décision sous incertitude ont été utilisés dans notre domaine. Malheureusement, leur utilisation repose sur des hypothèses fortes parfois difficiles à vérifier et ils ont été mis en défaut dans des situations théoriques et expérimentales simples. D’autres approches théoriques existent et ont pu être appliquées dans d’autres domaines. Elles pourraient donc potentiellement être utiles à nos différentes problématiques.
Dans cette activité, nous nous attacherons donc à poursuivre les travaux initiés dans ce sens, c'est-à-dire continuer d’identifier les approches existantes de la théorie de la décision intéressantes dans ce cadre et de faire la liaison entre les problèmes et les approches tout en gardant l’objectif de leur application industrielle. A plus long terme, nous souhaitons établir un cadre conceptuel de formalisation et un guide méthodologique pour aborder ces problèmes.
Le calcul de trajectoires est une activité de référence du domaine de la CFAO. De nombreuses publications ont porté sur la définition de méthodes de calcul. Les premiers travaux ont résolu les problèmes géométriques inhérents à la modélisation géométriques des pièces et des trajets. Durant la période 2006-2010, nos travaux se sont focalisés sur la formalisation du problème de l’optimisation, essentiellement cinématique, des trajectoires sous contrainte de respect d’exigences géométriques. La modélisation du problème et la résolution algorithmique ont été abordées. Nos travaux s’orientent maintenant dans deux directions.
La première concerne la déformation et l’adaptation des trajectoires à la tâche, pour tenir compte de la déformation des pièces et prendre en compte les corrections identifiées par des mesures extéroceptives (optiques ou efforts). Des modèles géométriques et mécaniques doivent être proposés pour tenir compte des informations captées. L’agilité se situe alors au niveau de l’adaptation de trajectoires à la pièce, pièce par pièce. Une autre voie de recherche concerne l’introduction de l’agilité dans les gammes de fabrication. Les évolutions technologiques rapides et les exigences de performance actuelles imposent de remettre en cause régulièrement les gammes de fabrication pour envisager de nouveaux gains. Mais ces évaluations doivent être réalisées à coût nul. Il est donc nécessaire d’envisager un nouveau formalisme de description des gammes de fabrication connecté aux environnements de CFAO, qui puissent évaluer les gains de performance (coût et temps d’usinage) rapidement. Les méthodes actuelles basées sur une description complète et lourde des processus et des opérations d’usinage n’apportent ni la précision ni la réactivité demandées. Le problème nécessite alors une reformulation complète.
L’évolution des machines avec l’intégration d’architecture parallèle a été un révélateur du potentiel des robots sériels et hybrides pour la réalisation d’opération à fortes sollicitations comme l’usinage.
L’offre des robots dans le secteur se développe mais la précision et le comportement cinématiques et dynamique restent à améliorer pour répondre aux attentes industrielles. La voie dans laquelle se positionnent nos travaux consiste à ajouter des redondances structurales pour améliorer le comportement des cellules et étendre l’espace de travail.
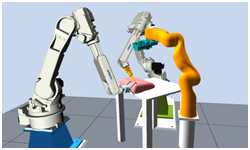
Ils concernent la planification optimisée des trajectoires de cellule multi-redondantes par le développement d’outil de programmation et de simulation pour la réalisation de tâches fortement sollicitantes et complexes comme l’usinage, la découpe et la manipulation de corps mous nécessitant également l’utilisation de commande référencée vision, force ou vision/force. L’optimisation est basée sur la définition d’une fonction objectif multi-critères (cinématique, mécanique, rigidité, précision) et la prise en compte des contraintes du procédé.

Restaurer la compétitivité de nos industries passe par la création de systèmes capables de répondre aux besoins changeants et exigeants du marché tout en gardant un bon niveau de productivité. Notre équipe contribue à cet effort en développant des méthodes novatrices et pluridisciplinaires tant pour la partie machines et systèmes industriels que pour l’intégration de la composante humaine (en terme de compétences).
Activité scientifique
L’objectif est d’atteindre une excellence opérationnelle dans toutes les situations. L’excellence opérationnelle est une démarche systématique et méthodique menée pour maximiser les performances en matière de productivité, de qualité des produits et de réduction des coûts, et plus généralement de performance.
Le thème est organisé selon les activités scientifiques suivantes :
- Optimisation de trajectoires
- Prise de décision en milieu incertain dans le cadre de la conception, du pilotage et de l’exploitation de systèmes complexes
- Intégration, conception et pilotage de systèmes industriels
Plaquette de présentation

Le thème scientifique est constitué de 9 permanents, et 12 doctorants :
Permanents
- Olivier Devise (MCF, référent scientifique)
- Christophe Caux (MCF-HDR)
- Hélène Chanal (MCF-HDR)
- Emmanuel Duc (PR)
- Séverine Durieux (MCF)
- Anne-Lise Huyet (MCF)
- Khalid Kouiss (MCF)
- Jean-Luc Paris (PR)
- Laurent Sabourin (MCF-HDR)
Doctorants
- Johan ROYER Johan (Doctorant inscrit au LIMOS, co-encadrement dans le cadre d’une coopération IP/LIMOS pour le projet PERICLES).
- Guillaume TROUVAIN
- Sami HASSINI
- Laurent DELOLME
- HENDRIKO
- Romain DENEFFLE
- Bastien GUICHARD
- Nadège BENKAMOUN
- Souhir BEN CHEIKH (Co-encadrement avec l’INSAT de Tunis)
- Amel HAJJI(Co-encadrement avec l’INSAT de Tunis)
- Souheil SEKKAT (Co-encadrement avec l’ENSEM de Casablanca)
- Imad CHALFOUN
- Bushra BASHIR
Thèses soutenues
- DEBOUT Pierre, Optimisation de la dépose de rubans de composites pour la fabrication de pièces aéronautiques, Université Blaise Pascal – Directeur E. Duc – coencadrement H. Chanal – 2 juillet 2010.
- GUIRE Grégory, Contribution à la mise en œuvre d’un processus robotisé pour la découpe primaire de carcasses bovines et de désossage de jambon, Université Blaise Pascal, 8 Juillet 2011.
- PATELOUP Sylvain, Modélisations et aptitudes à l'emploi des nouvelles architectures de machines outils à structure parallèle : Application à la machine Tripteor-X7, Université Blaise Pascal – Directeur E. Duc – coencadrement H. Chanal – 7 juillet 2011
- CHARDON Gregory, Optimisation du processus d’usinage des pièces composites expression des contraintes liées au procédé, Université Blaise Pascal – Directeur E. Duc – coencadrement H. Chanal – 7 juillet 2011
- BASHIR Bushra, Contribution to modeling and optimization of home healthcare, Université Blaise Pascal, 15 novembre 2013.
- AHMAD Maqsood, Mathematical models and methods based on metaheuristics approach for timetabling problem, Université Blaise Pascal, 15 novembre 2013.
- SUBRIN Kévin, Optimisation du comportement de cellules robotiques par gestion des redondances : application à la découpe de viande et à l’Usinage Grande Vitesse, Université Blaise Pascal, 13 Décembre 2013.
Collaborations sur les 5 dernières années
Nationales
- UMT08-2 « Mécanisation-robotisation dans les filières viandes et produits carnés » (2008-2013).
- Projet ANR Arpege ARMS « Système multi-bras pour la séparation de muscles » (2010-2014)
- Projet PERICLES : Programme d’Etude et de Recherche en Informatique : Collaboration entre Laboratoire et Etablissement de Santé 2011- ???
- ANR Vopamp 2010-2012
Internationales
- Projet Echord DEXDEB « application of DEXterous hands for DEBoning operation » (2011-2012)
- Université d’Indonésie 2011-2014
- Laboratoire IMS (Intelligente Manufacturing System) à l’Université de Windsor au Canada. Co-encadrement de la thèse de Nadège Benkamoun
Contrats sur les 5 dernières années
- Contrat cadre de recherche avec ICARE : 2005, 2006-2009, 2009-2012, 2012-2015
- Contrat cadre de recherche avec STEF : 2011-2014
- Projet ROBOT Start PME, piloté par le CETIM et le CEA pour le déploiement des robots dans les PME.
- Projet Agil@Prod
- Projet FUI Optiflux avec Renault Trucks, MécaCorp, 2MCP, Piroux Industrie : 2011-2014
- Projet FUI H&DL avec Renault Trucks : 2009-2012
- Projet LABEX RECONF : Système de Production Reconfigurable : 2012-2015
- Projet FUI SRDViand : Systèmes Robotisés de Découpe de Viande, N° 062906298 (2007-2011)
- Projet EQUIPEX RobotEx : Réseau national de plateformes robotiques d’excellence (2012-2022)
- Projet LABEX IMOBS3 : Innovative Mobility : Smart ans Sustainable Solutions (2011-2021)
- Projet FUI OFELIA avec Constellium et Aubert et Duval 2011-2014
- Projet ANR Emergence Adhoc 2012-2013
- Contrat de recherche Michelin 2011-2014
- Contrat de recherche Aubert et Duval 2012-2015
- Contrat de recherche Aubert et Duval 2013-2016
- Projet Ademe-Total GreenHSM 2013-2016
Moyens expérimentaux et/ou de calcul
- Logiciels de simulation et/ou de modélisation en version industrielle
- ARENA
- Quest
- Catia / Delmia
- Logiciels de pilotage et de supervision
- Unity Pro / Step7
- Intouch
- Centre de Transfert Technologique
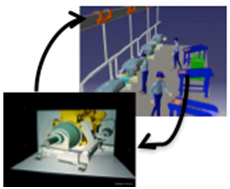
- Cellule d’assemblage composée d’un convoyeur et de trois robots
- Cellule Agil@Prod avec AGV et postes de travail
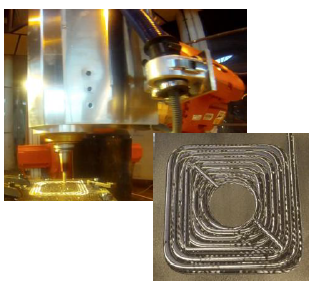
- Cellule d’usinage et de parachèvement
- Cellule Multi-bras
- Centres d’usinage à 4 et 5 axes
- Centres d’usinage à structure parallèle à 6 axes
- Robots d’usinage et de polissage, ...
La commande d'un système intègre les fonctions de pilotage des actionneurs en réaction aux informations capteurs, dans un but de productivité maximum. L’ajout de fonctions de diagnostic en vue de la maintenance, a posteriori, entraine des modifications difficiles à réaliser et donc coûteuses au niveau de la commande et du système physique (ajout de capteurs, de cartes de communication ...). L'objectif de cette recherche est de proposer une démarche de conception de composants réutilisables intégrant, en plus des fonctions classiques de la commande, celles utiles à la maintenance. Ceci consistera, notamment, en la mise en place des fonctions de surveillance, de détection et de diagnostic de pannes et de défaillances, fonctions indispensables pour transmettre au système de pilotage de la maintenance des alertes et des évaluations des probabilités de pannes futures. Enfin, l'étude des processus liés aux pilotages amènera à structurer la commande en fonction de ces processus métiers et non plus simplement en fonction du système à commander.